
The global circular economy is shrinking. It is high time to act. One solution would be to recycle technical plastics, but that has so far been quite cumbersome. We will show you how plastic recycling is finally becoming easy.

In today’s increasingly globalised world, service is often a nuisance for everyone. You have a problem with a household appliance, perhaps an oven, and you have specifically chosen a German brand. Luckily, the instructions also include a flyer with service numbers for each country. But when you enter the number into your phone, you always […]

One day after the trade show It happened near the beginning of the Hannover Messe, not all that long ago. They say that sometimes the best ideas come from a mix of nonsense and a little alcohol. Something like that must have been in play when the idea for the TRX emerged. Two exhausted, thirsty […]

Today I would like to introduce a topic that is often overlooked or not taken seriously, but can have a significant impact on the success of your business: professional energy chain installation. Whether you run a small manufacturing operation or manage a medium-sized facility, investing in the right expertise for your energy chain systems can […]

Nowadays, it is all about avoiding waste. The oceans are heavily polluted, the “Pacific garbage vortex” is about 4.5 times as large as Germany. The “zero waste” philosophy is gaining more and more attention especially in the food sector. We at igus have also set ourselves the goal of buildings and production becoming CO2-neutral by […]
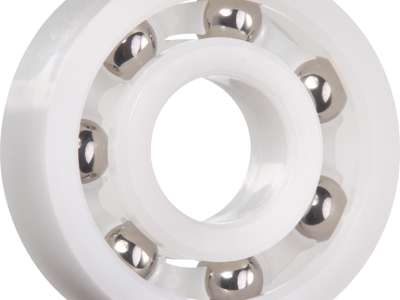
Deep groove ball bearings according to DIN 625 standard are the most commonly used ball bearings in industry. Depending on the application, plant operators have different requirements for the installed machine components. For deep groove ball bearings, for example, the possible speeds per minute are usually important. Which ball bearing is suitable for high speeds? And that even made of plastic? xiros is the answer.

The semiconductor industry always has demanding application environments. For example, installed components must always run flawlessly in order to keep plant productivity rates high. The etching of printed circuit boards or the production of LCD displays are two examples to illustrate this.

Internet of Things, big data and autonomous robots: the transition to Industry 4.0 is in full swing. This also applies to components that work in machines and have long since become smart by providing data on their condition, for example. But integrating smart technologies is often complex for companies and involves external installation effort. This is exactly where we start with the SMS module for our i.Sense systems.