
The global circular economy is shrinking. It is high time to act. One solution would be to recycle technical plastics, but that has so far been quite cumbersome. We will show you how plastic recycling is finally becoming easy.

In today’s increasingly globalised world, service is often a nuisance for everyone. You have a problem with a household appliance, perhaps an oven, and you have specifically chosen a German brand. Luckily, the instructions also include a flyer with service numbers for each country. But when you enter the number into your phone, you always […]

One day after the trade show It happened near the beginning of the Hannover Messe, not all that long ago. They say that sometimes the best ideas come from a mix of nonsense and a little alcohol. Something like that must have been in play when the idea for the TRX emerged. Two exhausted, thirsty […]

Today I would like to introduce a topic that is often overlooked or not taken seriously, but can have a significant impact on the success of your business: professional energy chain installation. Whether you run a small manufacturing operation or manage a medium-sized facility, investing in the right expertise for your energy chain systems can […]
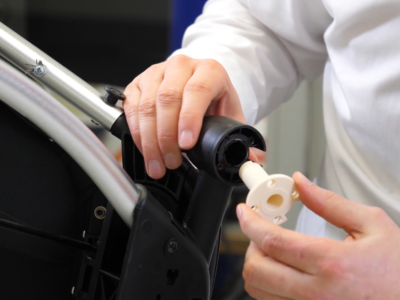
Bushings are usually pressed or clamped into the housing hole. In this way they hold securely in the hole and do not rotate unintentionally. But what if this is not possible due to manufacturing tolerances? Another not so rare case: The bushing should even rotate. Even if it is not part of the standard repertoire […]

The design possibilities of 3D printing are endless. Civil engineers and architects take advantage of this. Most recently, a house in Beckum was 3D printed. Read more about the many uses of 3D printers in architecture in this article.
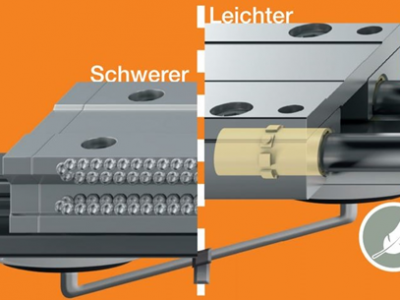
The TV commercial for the Soda Streamer presents it perfectly. Who wants to carry anything heavy nowadays? One of the things using PET bottles as an alternative to glass bottles aims at is weight. The sustainability of the two solutions will be discussed at a later time. “The fact is that it takes energy to […]
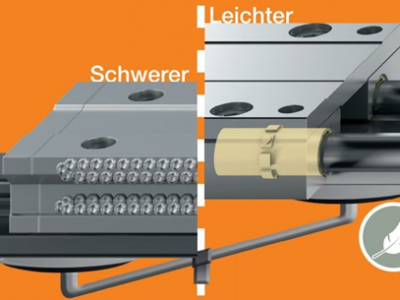
The TV commercial for the Soda Streamer presents it perfectly. Who wants to carry anything heavy nowadays? One of the things using PET bottles as an alternative to glass bottles aims at is weight. The sustainability of the two solutions will be discussed at a later time. “The fact is that it takes energy to […]