Low Cost Automation
igus India is developping an easy control unit for robolink joint arms with DC motors.
We can no longer supply the robolink® output encoders. Reason is that the chip supplier finished the production of the encoder chip. We have to block all AE Products now. This also concerns our RL-DCi compact units. We will have to redesign those for the use of motor encoders. For the next 4-8 weeks we will […]
Our german customer Jäger Software has used a RL-D-RBT-5532S-BC Standard arm (5 DOF, big Version) for a Quality check unit for RFID Chips. The RFID’s are checked and sorted. Mr. Jäger has developped his own control solution (Hardware and Software). For further questions, please contact: jaeger-software@t-online.de Vote Up +1 Vote Down -0You already voted!
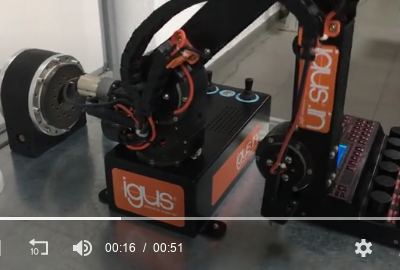
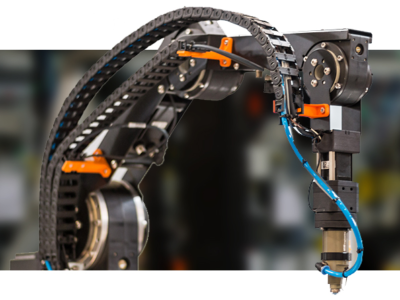
The Video shows a perfect application for our idea of low-cost-automation made easy with igus® components (here: robolink® Joint plus 2 drylin rails). A winding unit for the production of BLDC motors. The unit is build by Commonplace Robotics, it will be used for the production of motors for our rebel prototypes. Vote Up +1 […]

Visit us at Hannover Show 2018 (23.4.-27.4.) in Hall 16 opposite from the “big” igus booth. We will present 3 main new product ranges, our news-flyer and new robolink catalogue can be downloaded from this post
