In handling or in machine tools, energy supplies must be planned as “hanging” applications for vertical movement. This is actually not a great challenge, but there are things to consider in planning and design. Pivoting or fixed? Which connection method is the right one? Pivoting mounting brackets have the advantage that when installation space is […]
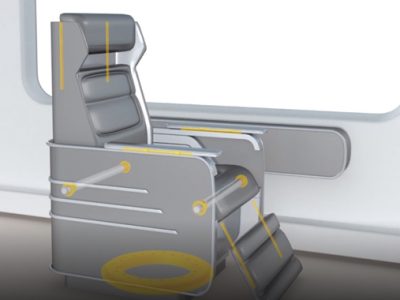
What do folding seats for metros, first-class seats on regional trains, and comfortable engine driver seats have in common? Upon first inspection, one might think it is only the obvious seat and back. But a more careful consideration reveals that each seat has polymer elements. Why polymer? Soft polymer dampens vibrations better and absorbs noise […]

The igus IAP1 sprue picker is being used in production at igus in more than 60 injection-moulding machines. The advantages are cost-effective automation, more economical production and amortisation in just a few months. What can the sprue picker do?

DNV GL is a classification society created in 2013 from a merger of Det Norske Veritas (Norway) and Germanischer Lloyd (Germany). The company assesses ships and offshore structures and issues guidelines on design and construction. DNV GL performs the role of monitoring compliance with issued regulations and assigns vessel classes to new constructions. The […]

In meat and fish-processing machines, but also in the fruit and and vegetable industry and filling technology, regular & intensive cleaning is the order of the day. Wherever food is cut, portioned, filled, transported or packaged, hygiene and frequent cleaning is important. If aggressive chemicals are used in the cleaning process, the machine components used […]