speed
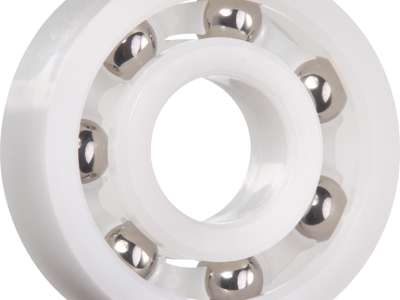
Deep groove ball bearings according to DIN 625 standard are the most commonly used ball bearings in industry. Depending on the application, plant operators have different requirements for the installed machine components. For deep groove ball bearings, for example, the possible speeds per minute are usually important. Which ball bearing is suitable for high speeds? And that even made of plastic? xiros is the answer.
Our german customer MATRIUM GmbH has designed and built this automation unit with a huge number of igus components such as drylinE rails, e-chains, chainflex, tribotape and also robolink. It runs today in daily operation. The robolink arm consists of 2 joints (size -20 and -30) and performs a “simple” scara movement. The complete unit is 5,50 x […]
we do several lifetime and performance tests with our robolink D joints. Until July, main topics were material and geometry optimisations for the gear and bearing components. Nowadays, we do lifetime tests for different joint types at different loads and speeds. The attached film shows or test unit with currently 9 test places, it will […]
We will present a new design for our robolink D joint arm concept at the AUTOMATICA trade show in Munich. Improvements (against HMI 2014 in April): – lean connection parts between the joints save weight and costs, – more dynamic movements, – 2 additional single axis (RL-D-20-001-MOT17-E) show the modular character of this product. I […]
once again I want to link to Malte Ahlers homepage and 2 of his Videos from his robot project ADAM A1. Now he is really running the 5DOF arm and he is using the 2nd one as teach-in arm. The movement speed and reaction time between left and right arm really impress me! Video1 – teach in: https://youtu.be/_67W2Arcvis […]