An interesting, unusual problem solution to the calculation of complicated Robolink® movements is offered by www.RoBo-mac.de The program, a Mathematical 3D joint Toolbox controls Direct and Inverse Kinematics, all parameter and measurements “of your robolink® arm” can become basic inputs of the calculation. The program tool not only calculates “Pick & Place” final positions, but also individual […]
ALBIS is an igus customer and supplier: https://www.albis.com/ At FAKUMA fair, they presented a very nice “demo plastic factory”, using our 4 DOF robolink® arm RL-D-RBT-3322-BC as manipulator. The complete project has been realised by the training workshop at Albis (“AZUBI” project). Very nice demonstration! Vote Up +5 Vote Down -0You […]
Our customer PROFACTOR from Austria (https://www.profactor.at/) has shown a new low cost sorting solution at MOTEK show in Stuttgart. They use our robolink® joint arm RL-DQ-RBT-5532S for this task. The arm uses a CPR control unit (http://www.commonplacerobotics.de/produkte/igusrobot.html) For further questions about the complete solution please contact Mr. Helmut Nöhmayer from PROFACTOR (Helmut.Noehmayer@profactor.at) Vote Up +0 […]
our customer four stars engineering systems (http://www.4stars-es.com/) uses RL-D joints for an automated quality check for printed cicuit boards. The shown unit is a four stars product, named robostar and can be ordered there (http://www.4stars-es.com/products/robostar-2/). Vote Up +0 Vote Down -0You already voted!
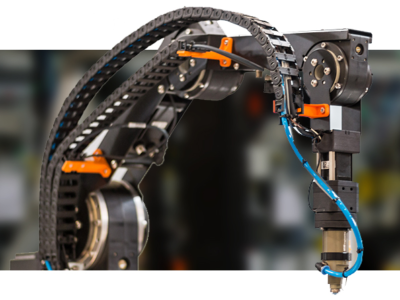
in older posts, I presented our current solution for pick+place of e-chain parts. Cycle time of 5-6 sec/pick is the most critical issue (we can not operate much faster due to missing stiffness of the igus arm). We now solve this issue by using our arms on drylin rails, in addition we use 2 units to […]
