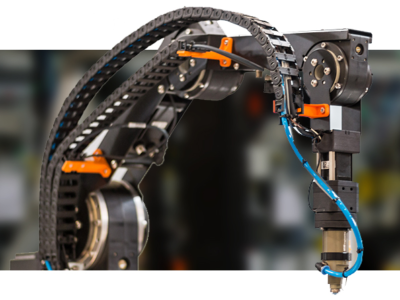
robolink®

The automation of processes can help small and medium-sized enterprises (SMEs) in mass customisation to achieve their production goals more efficiently and quickly. But still, many SMEs are sceptical about automation because they fear high investment costs and effort. A study shows the high potential of automation in medium-sized companies, especially in sectors such as logistics, pharmaceuticals, health and food. Thanks to Low Cost Automation, the cost of automation solutions has fallen sharply and companies can quickly see a return on investment. However, it is important to provide professional advice on component selection and cost transparency.

With regard to new machine tools, the digitisation of production is currently a topic of considerable interest. Everything is to become ‘smart’ and the milling machine itself should be responsible for re-ordering blanks. Large production facilities are already moving in this direction. But this solution is often still too expensive or unprofitable, especially for smaller […]

Virtual trade shows have become the new norm for us since April. Besides our own permanent exhibition in Cologne KMI (Köln Messe igus), we also take part in other exhibitions. The most recent event for the machine tool industry was D-Expo Metall (https://www.hanser-tagungen.de/en/d-expo-kunststoff). Within this framework, I was able to present exclusively some of our […]

Why use automation in the laboratory? Many small laboratories want to optimise their processes and increase their throughput rates but recoil at the frequently high costs and time-consuming integration work, when only simple combinations of devices or magazines are required. Until now, many routines such as “insertion/removal” have been performed manually, which ties up personnel […]
If you like our design tool “robolink designer”, you might press the tree button and let it snow: https://robolink-designer.igus.tools/construction Vote Up +0 Vote Down -0You already voted!