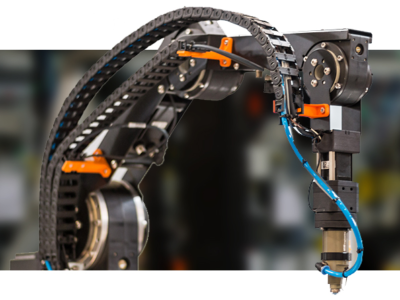
robolink® D

Company TPM from Taiwan uses our robolink for a commissioning task. Their main focus is to apply their own control and software solutions to our joint arms in order to serve the taiwanese market with affordable automation solutions.
igus India is developping an easy control unit for robolink joint arms with DC motors.
We can no longer supply the robolink® output encoders. Reason is that the chip supplier finished the production of the encoder chip. We have to block all AE Products now. This also concerns our RL-DCi compact units. We will have to redesign those for the use of motor encoders. For the next 4-8 weeks we will […]
Our german customer Jäger Software has used a RL-D-RBT-5532S-BC Standard arm (5 DOF, big Version) for a Quality check unit for RFID Chips. The RFID’s are checked and sorted. Mr. Jäger has developped his own control solution (Hardware and Software). For further questions, please contact: jaeger-software@t-online.de Vote Up +1 Vote Down -0You already voted!
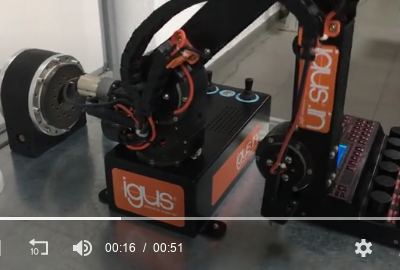
The Video shows a perfect application for our idea of low-cost-automation made easy with igus® components (here: robolink® Joint plus 2 drylin rails). A winding unit for the production of BLDC motors. The unit is build by Commonplace Robotics, it will be used for the production of motors for our rebel prototypes. Vote Up +1 […]