Neuheit

Visit us at Hannover Show 2018 (23.4.-27.4.) in Hall 16 opposite from the “big” igus booth. We will present 3 main new product ranges, our news-flyer and new robolink catalogue can be downloaded from this post
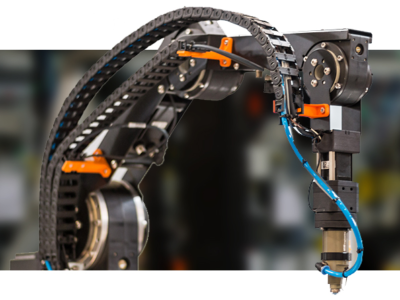
We will present this automation unit for the mounting of e-chains at the SPS show in Nürnberg next week. It contains a double drylin rail with 2 robolink® arms (5 DOF each). Cycle time is reduced to ~3 sec. with this monting unit. More information will follow… Vote Up +0 Vote Down -0You already […]
Our customer PROFACTOR from Austria (https://www.profactor.at/) has shown a new low cost sorting solution at MOTEK show in Stuttgart. They use our robolink® joint arm RL-DQ-RBT-5532S for this task. The arm uses a CPR control unit (http://www.commonplacerobotics.de/produkte/igusrobot.html) For further questions about the complete solution please contact Mr. Helmut Nöhmayer from PROFACTOR (Helmut.Noehmayer@profactor.at) Vote Up +0 […]
in older posts, I presented our current solution for pick+place of e-chain parts. Cycle time of 5-6 sec/pick is the most critical issue (we can not operate much faster due to missing stiffness of the igus arm). We now solve this issue by using our arms on drylin rails, in addition we use 2 units to […]
As the international product manager for RL at igus I have started this blog ~5 years ago and I use it as a platform to share our experiences and NEWS with most current data (download links for STEP data, datasheets and videos in most entries). Please find today an interview statement from me about our latest HMI […]