cables

In today’s increasingly globalised world, service is often a nuisance for everyone. You have a problem with a household appliance, perhaps an oven, and you have specifically chosen a German brand. Luckily, the instructions also include a flyer with service numbers for each country. But when you enter the number into your phone, you always […]

Today I would like to introduce a topic that is often overlooked or not taken seriously, but can have a significant impact on the success of your business: professional energy chain installation. Whether you run a small manufacturing operation or manage a medium-sized facility, investing in the right expertise for your energy chain systems can […]
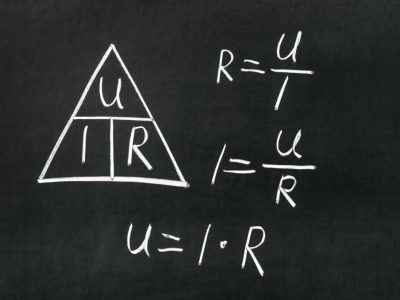
Most people remember the term resistance from physics lessons. In electrical engineering, on the other hand, the term is not only common, but also important for understanding. With regard to cables, too, it is important to take a closer look at the topic of resistance. In today’s post we will look at the issue of […]

Nowadays, it is all about avoiding waste. The oceans are heavily polluted, the “Pacific garbage vortex” is about 4.5 times as large as Germany. The “zero waste” philosophy is gaining more and more attention especially in the food sector. We at igus have also set ourselves the goal of buildings and production becoming CO2-neutral by […]

The year is 1989: The Berlin Wall falls, the Astra 1A television satellite goes into operation, Voyager 2 delivers images of Neptune and the first igus® chainflex® cable is launched in the market. We want to focus on the latter, despite the other important events.Because the world of production is also in a constant state […]