
The global circular economy is shrinking. It is high time to act. One solution would be to recycle technical plastics, but that has so far been quite cumbersome. We will show you how plastic recycling is finally becoming easy.

In today’s increasingly globalised world, service is often a nuisance for everyone. You have a problem with a household appliance, perhaps an oven, and you have specifically chosen a German brand. Luckily, the instructions also include a flyer with service numbers for each country. But when you enter the number into your phone, you always […]

One day after the trade show It happened near the beginning of the Hannover Messe, not all that long ago. They say that sometimes the best ideas come from a mix of nonsense and a little alcohol. Something like that must have been in play when the idea for the TRX emerged. Two exhausted, thirsty […]

Today I would like to introduce a topic that is often overlooked or not taken seriously, but can have a significant impact on the success of your business: professional energy chain installation. Whether you run a small manufacturing operation or manage a medium-sized facility, investing in the right expertise for your energy chain systems can […]

The world is happening online. Perhaps you have already taken part in an online customer appointment? What did you think? Online appointments are no longer new. In past posts, we’ve talked about buying cables in the home office and the importance of haptics when selling cables. After a year of practice, we are well settled […]
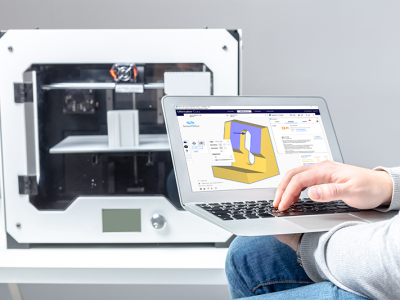
SmartSlice is a plug-in from Teton Simulation for the Cura 3D printed slicer. With SmartSlice, users can assess the components before the actual printing. It is a finite element simulation plug-in that uses material parameters and simulation technology to calculate the durability and deformation of printed parts before they are even printed. All inputs to […]

Self-aligning ball bearings (DIN 630) are double-row rolling bearings, consisting of an inner ring with a common ball raceway and an outer ring characterised by a hollow spherical design. Due to the hollow shape of the outer ring and the resulting angular mobility, self-aligning ball bearings are used in applications with larger misalignments, shaft deflections […]

It’s been over 5 years since I talked to other product managers about how Ethernet is evolving in the industry. CAT7 as a cable for the e-chain was a big topic at the time. The idea was to bring SPE technology from the car to the industry. Of course, a lot had to be created […]