
The global circular economy is shrinking. It is high time to act. One solution would be to recycle technical plastics, but that has so far been quite cumbersome. We will show you how plastic recycling is finally becoming easy.

In today’s increasingly globalised world, service is often a nuisance for everyone. You have a problem with a household appliance, perhaps an oven, and you have specifically chosen a German brand. Luckily, the instructions also include a flyer with service numbers for each country. But when you enter the number into your phone, you always […]

One day after the trade show It happened near the beginning of the Hannover Messe, not all that long ago. They say that sometimes the best ideas come from a mix of nonsense and a little alcohol. Something like that must have been in play when the idea for the TRX emerged. Two exhausted, thirsty […]

Today I would like to introduce a topic that is often overlooked or not taken seriously, but can have a significant impact on the success of your business: professional energy chain installation. Whether you run a small manufacturing operation or manage a medium-sized facility, investing in the right expertise for your energy chain systems can […]
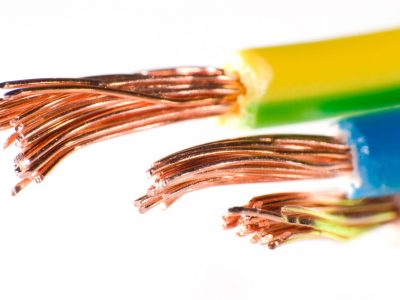
“Cables made of silver and gold-plated connectors. Is this a trend out of Hollywood?” I had to smile when this question was asked in a training course for mechatronics trainees. Haven’t you ever wondered why cables are mostly made of copper and why there are such exotics where precious metals like gold and silver are […]

Machines and components such as ball bearings used in food processing face enormous challenges. In addition to the use of the most aggressive cleaners, just as much water is used. Germs are counteracted and contamination of the food is prevented. Below you can read more about how a customer in the fish processing industry improved […]
In this section of our series of articles on the subject of plain bearing materials, we look at the so-called metal-polymer plain bearings. What are metal-polymer plain bearings? How do they differentiate themselves from other types of bearings? What are they particularly good for and when is it better to leave them alone? In this […]

Especially now, preventive hygiene measures, or hygiene management, are in the spotlight. Especially in public facilities such as hotels, schools or hospitals, they play an indispensable role. Disinfection robots can provide a remedy here. But how safe is this new technology and is the use of robots worthwhile for public institutions? Time to take a […]