
The global circular economy is shrinking. It is high time to act. One solution would be to recycle technical plastics, but that has so far been quite cumbersome. We will show you how plastic recycling is finally becoming easy.

In today’s increasingly globalised world, service is often a nuisance for everyone. You have a problem with a household appliance, perhaps an oven, and you have specifically chosen a German brand. Luckily, the instructions also include a flyer with service numbers for each country. But when you enter the number into your phone, you always […]

One day after the trade show It happened near the beginning of the Hannover Messe, not all that long ago. They say that sometimes the best ideas come from a mix of nonsense and a little alcohol. Something like that must have been in play when the idea for the TRX emerged. Two exhausted, thirsty […]

Today I would like to introduce a topic that is often overlooked or not taken seriously, but can have a significant impact on the success of your business: professional energy chain installation. Whether you run a small manufacturing operation or manage a medium-sized facility, investing in the right expertise for your energy chain systems can […]
In the current climate, every minute often counts in production plants. Efficient, intelligent maintenance protects against expensive production downtimes and unplanned shutdowns. The service life of our igus® products can be calculated online. What's more: With smart plastics, the components report at an early stage when they are due for replacement. In this article I would like to show you how we have successfully introduced smart maintenance to our customers.

Bearing damage can often be traced back to an insufficient press fit. In addition to inadequate lubrication or incorrect design, bearing bushings that are insufficiently located in the bearing position are among the most frequent causes of premature failures. There are many reasons for insufficient press fit. But did you know that anti-corrosion agents are […]

It is likely that everyone has taken a spoon from the kitchen at one time or another and started bending it. The first time I bent a spoon, I looked confused when I couldn’t bend it back the right way. So I did the only “logical” thing for a little boy and made sure my […]
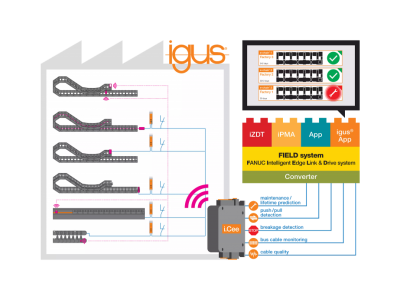
For machine data evaluation in the smart factory, FANUC offers the "FIELD system" industrial IoT platform. igus is also involved with its i.Cee app for predictive maintenance.