
The global circular economy is shrinking. It is high time to act. One solution would be to recycle technical plastics, but that has so far been quite cumbersome. We will show you how plastic recycling is finally becoming easy.

In today’s increasingly globalised world, service is often a nuisance for everyone. You have a problem with a household appliance, perhaps an oven, and you have specifically chosen a German brand. Luckily, the instructions also include a flyer with service numbers for each country. But when you enter the number into your phone, you always […]

One day after the trade show It happened near the beginning of the Hannover Messe, not all that long ago. They say that sometimes the best ideas come from a mix of nonsense and a little alcohol. Something like that must have been in play when the idea for the TRX emerged. Two exhausted, thirsty […]

Today I would like to introduce a topic that is often overlooked or not taken seriously, but can have a significant impact on the success of your business: professional energy chain installation. Whether you run a small manufacturing operation or manage a medium-sized facility, investing in the right expertise for your energy chain systems can […]

With the market launch in 2007, igus achieved a milestone with the in-house material xirodur A500 for plastic ball bearings. This is because ball bearings made of this material have the specification of perfect functioning both at very high temperatures and in applications in chemical environments. Our ball bearings come without a drop of lubricating […]

Are you looking for a suitable energy chain for your application, but having a hard time finding the right product? Then you are exactly at the right place! In this article, we have compiled for you the 6 best energy chain systems with which you can successfully implement 90% of all applications. We evaluated them […]
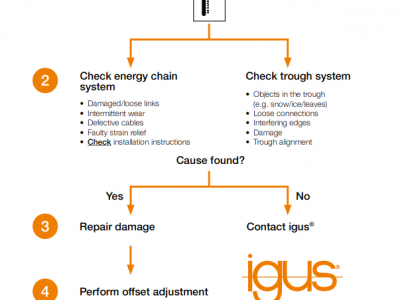
Today we want to look at the operational application of smart plastics’ intelligent push/pull force monitoring. More specifically, ask the question, What to do if i.Sense EC.P has triggered once? What measures are then to be carried out to quickly reactivate the system again?

Night vision devices are mostly associated with types of binoculars that enable as well as enhance visual perception in the dark. They are used by the military or police, security services, but especially by hunters or naturalists. It doesn’t always have to be the familiar binocular shape. Developers always adapt to the different environments so […]