
The global circular economy is shrinking. It is high time to act. One solution would be to recycle technical plastics, but that has so far been quite cumbersome. We will show you how plastic recycling is finally becoming easy.

In today’s increasingly globalised world, service is often a nuisance for everyone. You have a problem with a household appliance, perhaps an oven, and you have specifically chosen a German brand. Luckily, the instructions also include a flyer with service numbers for each country. But when you enter the number into your phone, you always […]

One day after the trade show It happened near the beginning of the Hannover Messe, not all that long ago. They say that sometimes the best ideas come from a mix of nonsense and a little alcohol. Something like that must have been in play when the idea for the TRX emerged. Two exhausted, thirsty […]

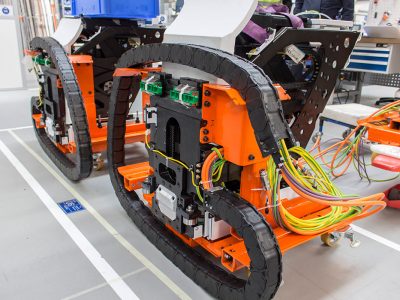
Today I would like to introduce a topic that is often overlooked or not taken seriously, but can have a significant impact on the success of your business: professional energy chain installation. Whether you run a small manufacturing operation or manage a medium-sized facility, investing in the right expertise for your energy chain systems can […]

When I first heard this statement over 15 years ago, I thought, “We can’t be serious.” A complaint is a bad thing, it costs money, damages reputation, causes discord and involves a lot of work. Today, I stand rock solid behind that very statement. But why? The disappointed customer I would like to illustrate my […]
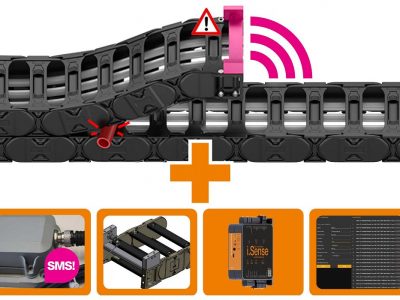
Condition monitoring systems are designed to eliminate unplanned downtime of machines and industrial plants by means of permanent condition monitoring. With the aid of 3D visualisations, these i.Sense systems can be integrated early in the design process.
In harsh environments, cables need to be protected from dust, chips, dirt and other external influences. The best protection is offered by the closed energy chains from igus® – also known as energy tubes or e-tubes. What are closed energy chains? Compared to open energy chains (picture 1), closed energy chains (diagram 2) are completely […]

Storage and retrieval units are often in use for more than 20 years. In the meantime, the units, like all machines, are regularly maintained, inspected, repaired and cleaned in a more or less fixed cycle whereby an electrical or mechanical retrofit is sometimes necessary. The conductor line in the aisle is an important part of […]