
The global circular economy is shrinking. It is high time to act. One solution would be to recycle technical plastics, but that has so far been quite cumbersome. We will show you how plastic recycling is finally becoming easy.

In today’s increasingly globalised world, service is often a nuisance for everyone. You have a problem with a household appliance, perhaps an oven, and you have specifically chosen a German brand. Luckily, the instructions also include a flyer with service numbers for each country. But when you enter the number into your phone, you always […]

One day after the trade show It happened near the beginning of the Hannover Messe, not all that long ago. They say that sometimes the best ideas come from a mix of nonsense and a little alcohol. Something like that must have been in play when the idea for the TRX emerged. Two exhausted, thirsty […]

Today I would like to introduce a topic that is often overlooked or not taken seriously, but can have a significant impact on the success of your business: professional energy chain installation. Whether you run a small manufacturing operation or manage a medium-sized facility, investing in the right expertise for your energy chain systems can […]

Powder lacquering, also known as powder coating, can be easily applied to conductive materials by means of electrostatic charging. For this purpose, the component is charged and the powder is applied using a spray gun in the tribo or corona charging process. The powder adheres to the component and thus builds up a uniform layer. […]
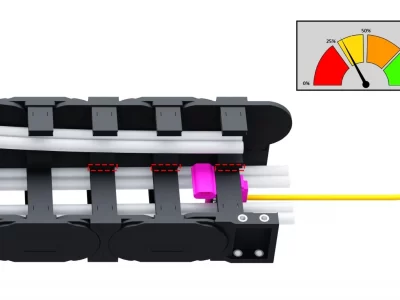
Machine failures and downtimes are among the biggest cost drivers in industry. It is therefore important for maintenance personnel to act in good time to prevent unplanned stoppages. With the new i.Sense EC.W low-cost service life sensor from igus, users can now make their e-chain smart from just 248 euros. Thanks to real-time condition monitoring of the energy chain, maintenance is easier and more cost-effective over the entire service life.

As an industry expert and product manager for heavy-duty plain bearings at igus GmbH, Uwe Sund encounters these challenges every day in his work with manufacturers of machines and vehicles for agriculture, construction and forestry. In the interview, he explains how manufacturers can prevent complaints due to insufficient lubrication.
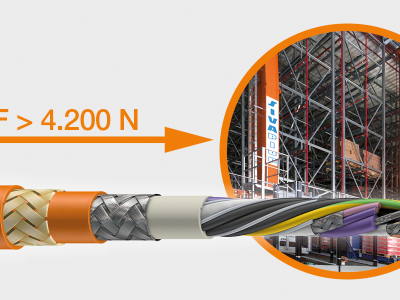
You have certainly heard of it – the new SEW-Eurodrive: Movilink® DDI generation of drives. They are drive motors with a digital data interface. The supply cable is a hybrid cable with a coaxial element. So far, so good! But of course you would also like to have this engine generation in SRUs, cross-traversing trolleys, […]