Low Cost Automation

Why use automation in the laboratory? Many small laboratories want to optimise their processes and increase their throughput rates but recoil at the frequently high costs and time-consuming integration work, when only simple combinations of devices or magazines are required. Until now, many routines such as “insertion/removal” have been performed manually, which ties up personnel […]

Due to the current situation with the Covid-19 virus, protective masks are our daily companion, whether in the supermarket or when visiting the doctor. Whether self-sewn or produced masks, almost everyone has at least one mask for their own needs. But what can you do if you have forgotten the mask and still have to […]
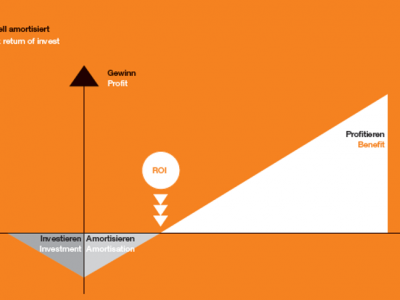
An exact analysis of the application processes is therefore worthwhile. Costs can be saved by splitting complex overall processes into simpler individual processes. This is exactly the approach we take at igus when we create our applications and generate examples of low cost automation – Find out more in the following videos.
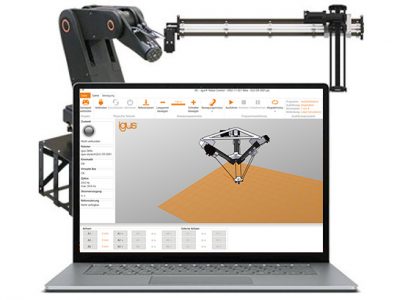
After our article on “What types of robots are there, and which robot is the right one for my application?“, we now come to the truly fascinating part of cost-effective automation: how can you program robots yourself? Can you do it at all without expert knowledge? What happens during automation and offline programming? Advantages of […]
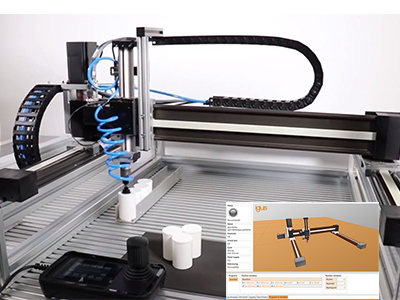
In short, linear robots are multi-axis systems that are (usually) constructed to move to Cartesian coordinates. One synonym for linear robot is Cartesian robot. But what do linear robots look like, and why are they seen as the gateway to the world of automation?